La fotogrametría aérea con drones ha dejado de ser una herramienta de nicho para convertirse en la forma más eficiente de capturar el estado real de un sitio de obra, un corredor vial o un activo industrial. Pero el dato bruto — miles de fotografías en RAW — no tiene valor por sí mismo. Su valor aparece cuando se convierte en geometría tridimensional precisa, georeferenciada y, finalmente, en un modelo BIM vinculado a información técnica real.
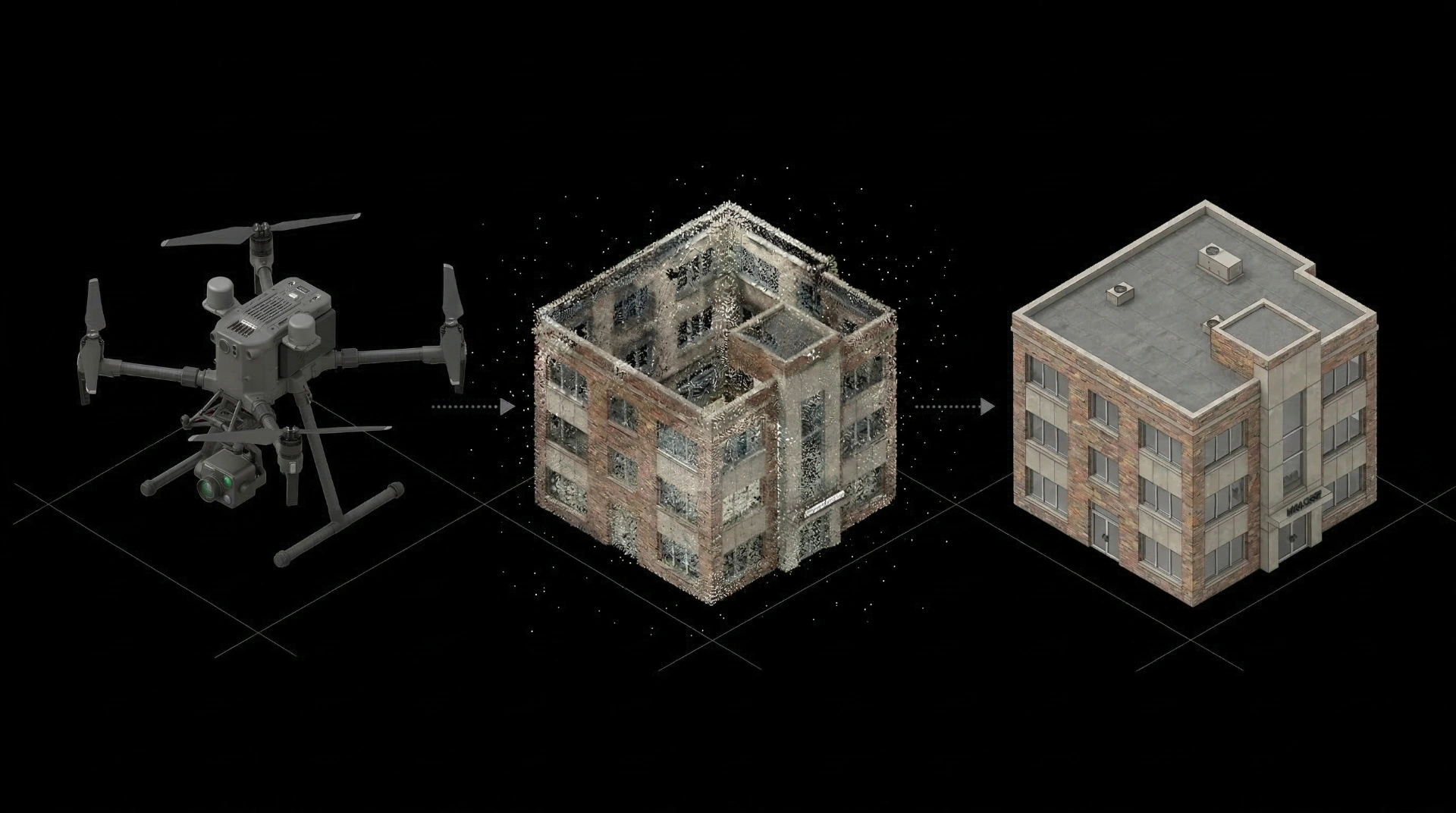
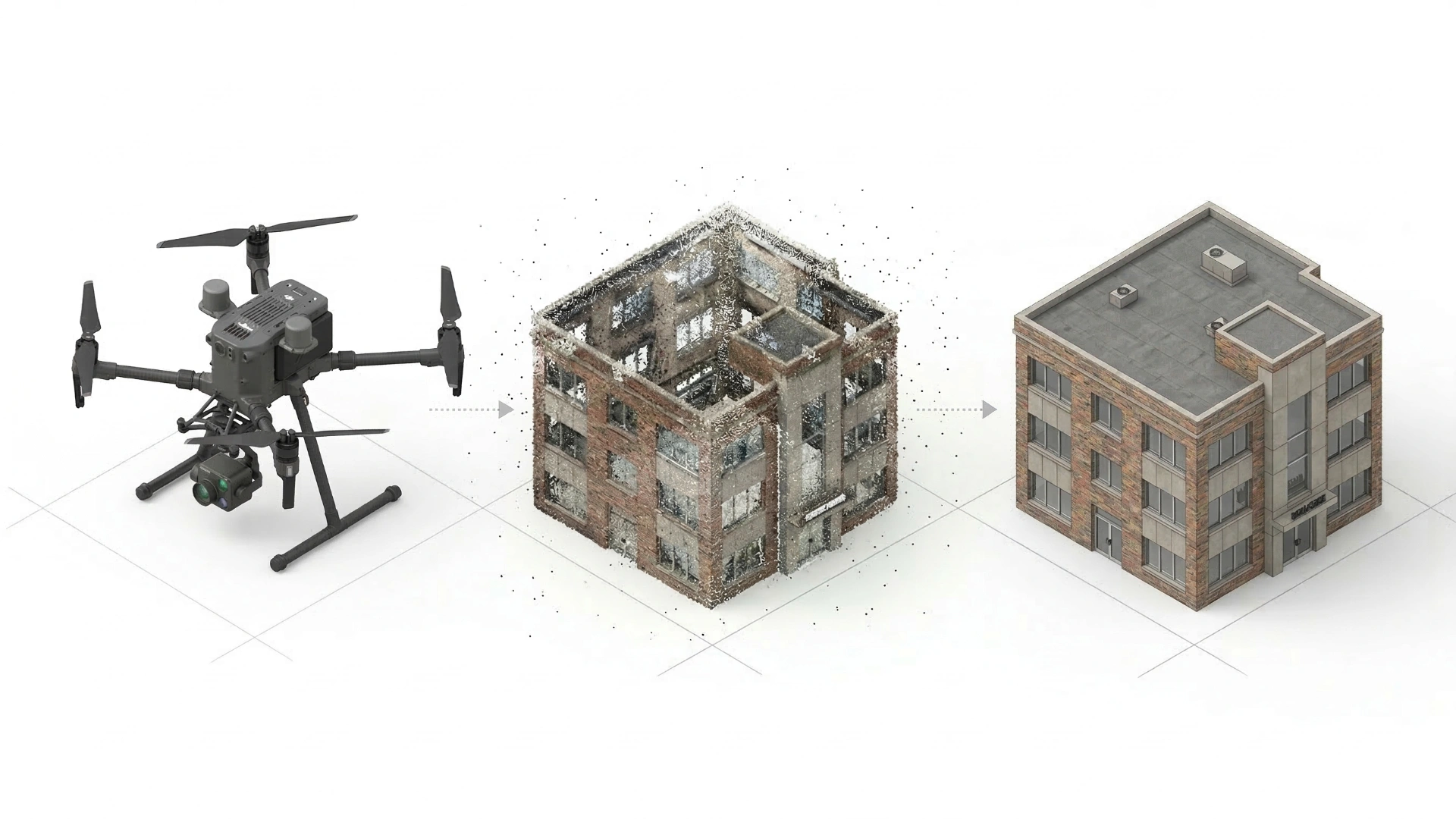
Este artículo describe el pipeline técnico completo que usamos en ANTORR: desde la planificación del vuelo hasta el modelo de información en Revit, pasando por el procesamiento fotogramétrico en Agisoft Metashape y la gestión de la nube de puntos en Autodesk ReCap Pro. No es un tutorial de menús. Es la lógica técnica detrás de cada decisión.
La base matemática: Structure-from-Motion no es solo tomar fotos
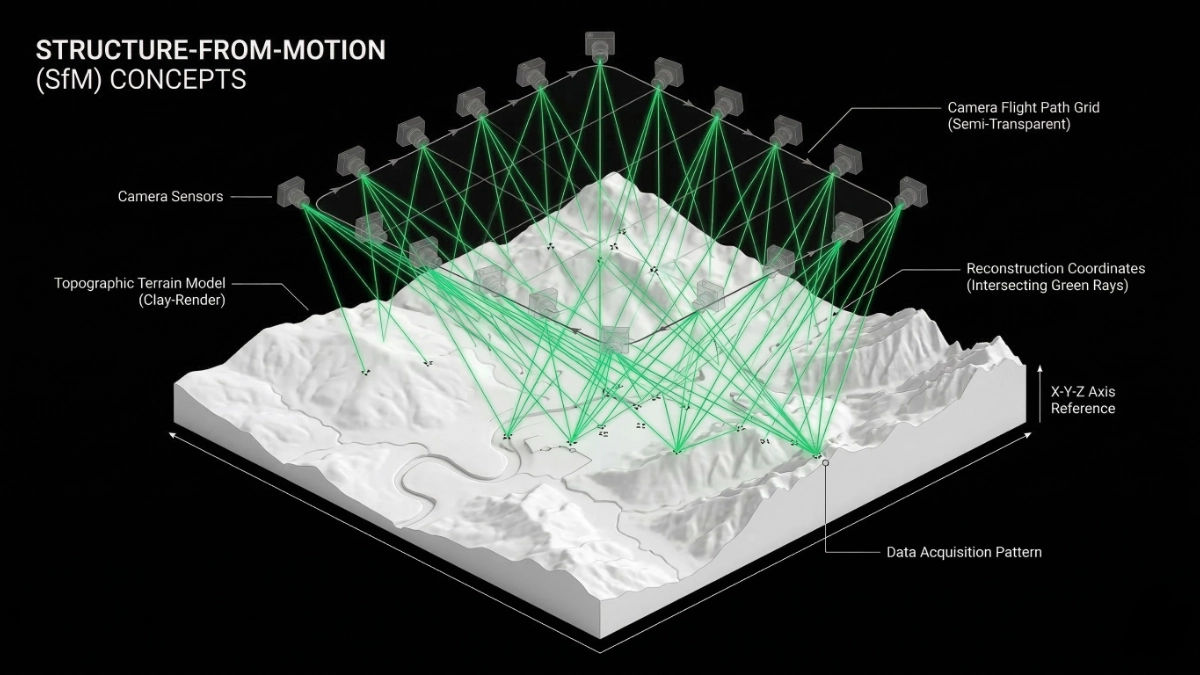
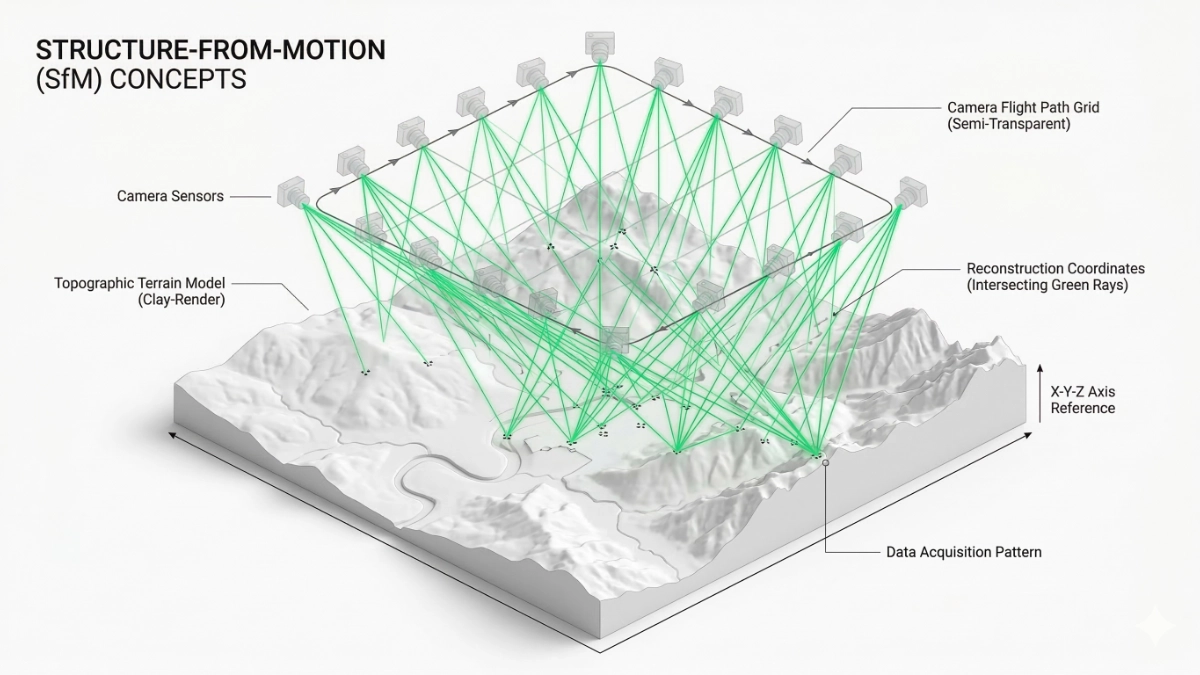
El motor de Agisoft Metashape — como el de cualquier software fotogramétrico profesional — opera sobre el principio de Structure-from-Motion (SfM): la reconstrucción simultánea de la geometría 3D de una escena y la posición de la cámara desde un conjunto de imágenes solapadas tomadas desde distintos ángulos. A diferencia de la fotogrametría clásica que requería cámaras métricas calibradas, SfM estima los parámetros de orientación interna y externa de forma algorítmica, lo que lo hace viable con cualquier cámara de calidad suficiente.
Westoby et al. (2012) documentaron el potencial y las limitaciones de SfM para aplicaciones en geociencias en un artículo ampliamente citado que estableció los parámetros de referencia para precisión, cobertura y densidad de puntos en levantamientos con plataformas aéreas no tripuladas. Remondino y El-Hakim (2006) revisaron con anterioridad las bases del modelado 3D basado en imágenes y sentaron las condiciones mínimas de solapamiento y geometría de captura que siguen siendo válidas en la práctica actual. La conclusión central de ambos trabajos es que la calidad del resultado fotogramétrico es función directa de la geometría del vuelo, no del software.
Fuentes: Westoby, M.J. et al. (2012). 'Structure-from-Motion' photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology, 179, 300–314. · Remondino, F. & El-Hakim, S. (2006). Image-based 3D modelling: A review. The Photogrammetric Record, 21(115), 269–291.
GSD: el parámetro que controla todo
El Ground Sampling Distance (GSD) es la dimensión real en el terreno representada por cada píxel de la imagen capturada. Su fórmula es:
GSD (cm/px) = (altura de vuelo × tamaño de píxel del sensor) / distancia focal
Para modelado BIM as-built con precisión estructural — donde se espera detectar diferencias dimensionales de 1–2 cm — el GSD objetivo está entre 1.5 y 2.5 cm/px, lo que implica vuelos entre 60 y 90 metros de altura con sensores de formato APS-C o similar. Para levantamientos topográficos de corredores viales donde el objetivo es la generación de superficies de terreno y no la identificación de elementos constructivos, valores de GSD entre 4 y 8 cm/px son aceptables y permiten vuelos a mayor altura con mayor cobertura por misión.
Tabla 1
Parámetros de vuelo por tipo de aplicación fotogramétrica
| Aplicación | GSD objetivo | Altura de vuelo | Solapamiento |
|---|---|---|---|
| Modelado BIM as-built | 1.5 – 2.5 cm/px | 60 – 90 m | 85% / 80% |
| Levantamiento topográfico vial | 4 – 8 cm/px | 120 – 180 m | 80% / 70% |
| Inspección estructural | 0.3 – 1.0 cm/px | 10 – 30 m | 90% / 85% |
| Ortofoto general | 8 – 15 cm/px | 200 – 300 m | 70% / 65% |
Nota. Elaboración propia. GSD = Ground Sampling Distance; solapamiento: frontal / lateral.
Georeferenciación: MAGNA-SIRGAS y CTM-12 en proyectos colombianos
Un modelo fotogramétrico sin georeferenciación precisa es geometría flotante — visualmente correcta pero métricamente inútil para la coordinación con modelos BIM existentes o para la comparación con levantamientos anteriores. En Colombia, el sistema de referencia oficial para proyectos de ingeniería civil es MAGNA-SIRGAS, con las proyecciones del sistema CTM-12 (Colombia Transversal de Mercator) que dividen el territorio en fajas de 3° de ancho.
El proceso de georeferenciación en Metashape requiere puntos de control en tierra (GCPs — Ground Control Points) levantados con GPS diferencial o estación total, referenciados en las coordenadas planas de la faja CTM-12 correspondiente. El número mínimo práctico es 5 GCPs bien distribuidos en el área de vuelo, con verificación mediante puntos de control independientes (check points) para estimar el error residual. En proyectos lineales — corredores viales, redes de drenaje — los GCPs deben distribuirse tanto transversal como longitudinalmente para controlar la deformación de "banana" que introduce la orientación directa por GPS de la aeronave.
"La precisión final del modelo no la determina Metashape. La determina la calidad de los GCPs, su distribución geométrica en el área de vuelo y la metodología de captura de las imágenes. El software solo procesa lo que el ingeniero de vuelo diseñó correctamente."
Flujo en Agisoft Metashape: de imágenes a nube densa
El flujo de trabajo en Metashape Professional tiene cinco etapas con parámetros críticos en cada una. La documentación oficial de Agisoft (Metashape User Manual, versión 2.1, 2023) describe los algoritmos subyacentes; aquí describimos la lógica de decisión práctica.
Tabla 2
Etapas del flujo de trabajo en Agisoft Metashape Professional y parámetros clave
| Etapa | Descripción y parámetros clave |
|---|---|
| Alineación de cámaras (Align Photos) | Detección de puntos característicos (keypoints) por algoritmo SIFT modificado, emparejamiento entre imágenes solapadas y ajuste del haz de rayos (bundle adjustment) para estimar posición y orientación de cada cámara. Calidad Alta o Máxima para proyectos de ingeniería; Media para reconocimiento preliminar. Esta etapa define el error de reproyección — valores menores a 0.5 px son aceptables para BIM. |
| Construcción de nube densa (Build Dense Cloud) | Reconstrucción estéreo densa basada en las posiciones de cámara estimadas. Calidad Alta genera densidades típicas de 200–800 puntos/m² a GSD de 2 cm. Para proyectos BIM, el filtrado de profundidad debe estar en Mild para preservar detalles geométricos finos. |
| Construcción de malla (Build Mesh) | Opcional para inspección visual; no necesaria si el objetivo final es la nube de puntos para Revit. Útil para exportar modelos OBJ o FBX para visualización en plataformas de realidad aumentada o revisión de cliente. |
| DEM y ortomosaico | El DEM se exporta en GeoTIFF con proyección CTM-12 para uso en software de diseño vial (Civil 3D). La ortofoto se genera a la resolución del GSD y se entrega como GeoTIFF con el mismo sistema de referencia. |
| Exportación de nube de puntos | Para el flujo hacia ReCap y Revit, los formatos nativos son .LAS 1.4 (estándar ASPRS, 2019) o .E57. LAS es preferible por su compatibilidad amplia y soporte de clasificación por código de retorno. |
Nota. Elaboración propia basada en Agisoft LLC (2023) y ASPRS (2019).
Fuente: ASPRS. (2019). LAS Specification Version 1.4-R15. American Society for Photogrammetry and Remote Sensing. · Agisoft LLC. (2023). Agisoft Metashape User Manual: Professional Edition, version 2.1.
Autodesk ReCap Pro: gestión y preparación de la nube
ReCap Pro no es un procesador fotogramétrico — no compite con Metashape. Su función es la gestión, organización y preparación de nubes de puntos para el ecosistema Autodesk, especialmente para su uso en Revit y Civil 3D. Opera sobre dos formatos propietarios: .RCS (Reality Capture Scene) que contiene los datos de puntos individuales, y .RCP (Reality Capture Project) que referencia y organiza uno o múltiples archivos .RCS como un proyecto unificado.
El flujo desde Metashape es directo: se importa el archivo .LAS exportado y ReCap genera automáticamente los archivos .RCS/.RCP con el sistema de coordenadas del archivo fuente. Los pasos críticos antes de la vinculación a Revit son:
Tabla 3
Operaciones clave en Autodesk ReCap Pro para la preparación de nubes de puntos
| Operación en ReCap | Descripción |
|---|---|
| Limpieza de puntos de ruido | ReCap permite seleccionar y eliminar puntos fuera de rango (outliers) y vegetación densa mediante filtros de densidad y elevación. Para modelos BIM, se elimina la vegetación que oscurece superficies construidas y los artefactos de reflexión en superficies especulares (vidrio, agua). |
| Definición del sistema de coordenadas | Se asigna el EPSG correspondiente a la faja CTM-12 (por ejemplo, EPSG:9377 para CTM-12 zona nacional) para que Revit reciba la nube en coordenadas absolutas. |
| Partición en regiones (Limit Box) | Para proyectos extensos, se delimitan regiones de trabajo que permiten trabajar en Revit sin cargar la totalidad de la nube, mejorando el rendimiento del modelo. |
Nota. Elaboración propia.
Revit: el modelo sobre la nube
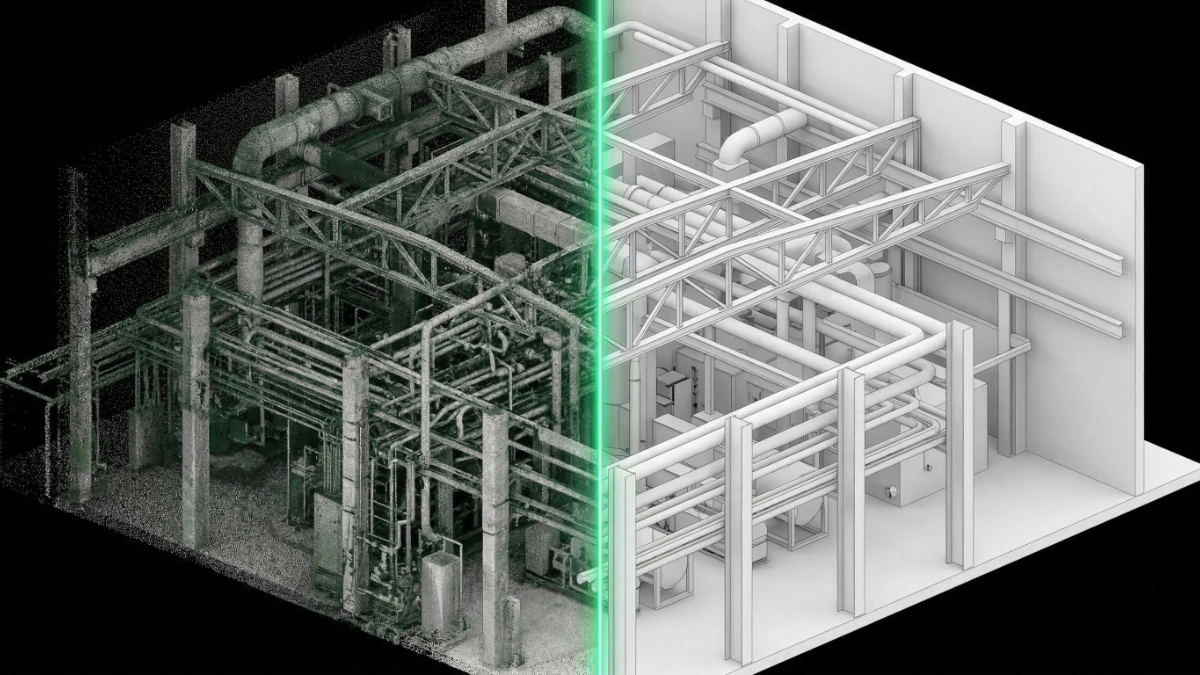
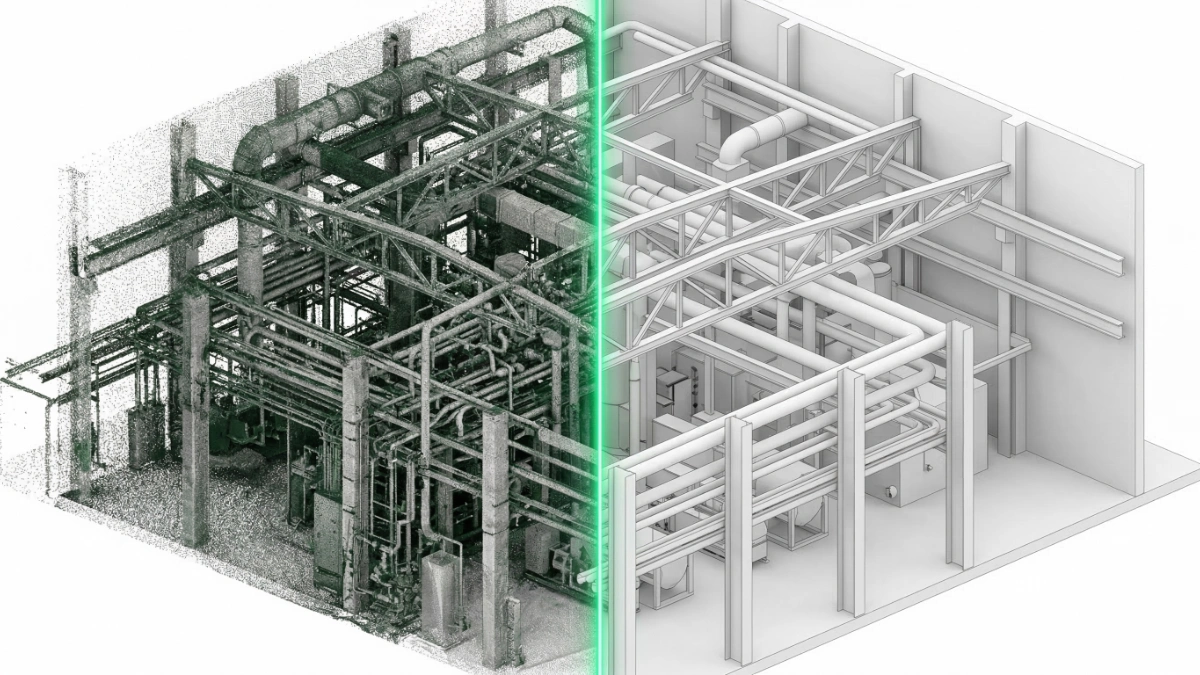
La vinculación de la nube de puntos en Revit se realiza mediante Insertar → Vincular nube de puntos y seleccionando el archivo .RCP generado en ReCap. Revit renderiza la nube como referencia visual en todas las vistas y permite trabajar sobre ella con las herramientas de modelado normales.
Tang et al. (2010) sistematizaron los métodos de reconstrucción automática de modelos as-built a partir de nubes de puntos escaneadas con láser y establecieron la taxonomía que sigue siendo válida para nubes fotogramétricas: modelado manual sobre nube, semiautomático con detección de primitivas y automatizado. Para la práctica actual con Revit, el método predominante sigue siendo el manual-asistido: el modelador usa la nube como referencia tridimensional para colocar elementos de familia con precisión, sin que el software infiera automáticamente la geometría.
Fuente: Tang, P., Huber, D., Akinci, B., Lipman, R. & Lytle, A. (2010). Automatic reconstruction of as-built building information models from laser-scanned point clouds: A review of related techniques. Automation in Construction, 19(7), 829–843.
Las buenas prácticas en Revit para el modelado sobre nube son:
Servicio ANTORR
Levantamiento fotogramétrico + modelo BIM as-built
Ejecutamos el pipeline completo de vuelo fotogramétrico a modelo BIM as-built coordinado bajo ISO 19650. Entregamos nube de puntos georeferenciada en MAGNA-SIRGAS/CTM-12, ortofoto GSD ≤ 2 cm/px y modelo Revit con el LOD acordado en el BEP.
Limitaciones reales del pipeline y cómo mitigarlas
La fotogrametría con drones tiene limitaciones técnicas que ningún software puede resolver por sí solo:
Cómo citar este artículo
APA 7.ª edición
Torres, E. (2026, febrero 7). Del drone al modelo BIM: pipeline completo Metashape → ReCap → Revit. ANTORR Ingeniería S.A.S. https://antorr.co/academia/fotogrametria-metashape-recap-revit.html
Chicago 17.ª edición
Torres, Emil. "Del drone al modelo BIM: pipeline completo Metashape → ReCap → Revit." ANTORR Academia, 7 de febrero de 2026. https://antorr.co/academia/fotogrametria-metashape-recap-revit.html
Referencias bibliográficas
- Torres, E. (2026, febrero 7). Del drone al modelo BIM: pipeline completo Metashape → ReCap → Revit. ANTORR Ingeniería S.A.S. https://antorr.co/academia/fotogrametria-metashape-recap-revit.html [artículo citado]
- Agisoft LLC. (2023). Agisoft Metashape User Manual: Professional Edition, version 2.1. St. Petersburg, Russia. https://www.agisoft.com/pdf/metashape-pro_2_1_en.pdf
- ASPRS. (2019). LAS Specification Version 1.4-R15. American Society for Photogrammetry and Remote Sensing. https://www.asprs.org/divisions-committees/lidar-division/laser-las-file-format-exchange-activities
- ISO. (2018). ISO 19650-2: Information management using building information modelling — Part 2: Delivery phase of the assets. International Organization for Standardization.
- Lowe, D. G. (2004). Distinctive image features from scale-invariant keypoints. International Journal of Computer Vision, 60(2), 91–110. https://doi.org/10.1023/B:VISI.0000029664.99615.94
- Remondino, F., & El-Hakim, S. (2006). Image-based 3D modelling: A review. The Photogrammetric Record, 21(115), 269–291. https://doi.org/10.1111/j.1477-9730.2006.00383.x
- Sacks, R., Eastman, C., Lee, G., & Teicholz, P. (2018). BIM Handbook: A guide to building information modeling for owners, designers, engineers, contractors, and facility managers (3.ª ed.). John Wiley & Sons.
- Tang, P., Huber, D., Akinci, B., Lipman, R., & Lytle, A. (2010). Automatic reconstruction of as-built building information models from laser-scanned point clouds: A review of related techniques. Automation in Construction, 19(7), 829–843. https://doi.org/10.1016/j.autcon.2010.06.007
- Westoby, M. J., Brasington, J., Glasser, N. F., Hambrey, M. J., & Reynolds, J. M. (2012). 'Structure-from-Motion' photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology, 179, 300–314. https://doi.org/10.1016/j.geomorph.2012.08.021